|
|
人形机器人发展历程
人形机器人又称仿生人,是一种旨在模仿人体结构、运动特性等的机器人,拥有人类的感知和运动技能,以及人类在环境中使用工具的能力。 人类希望制造一种像人一样的机器,以便代替人类完成各种工作。机器人一词的出现和世界上第一台工业机器人的问世都是近几十年的事。然而人们对机器人的幻想与追求却已有3000多年的历史。
人形机器人的诞生 概念最开始主要存在于文献记载和民间传说中。 公元前4世纪,古希腊科学家亚里士多德提出了“机器人”的设想。 1495年,达芬奇绘制的“机器武士”,它以风能和水力为驱动力,机器人可以挥舞胳膊,可以坐或者站立。
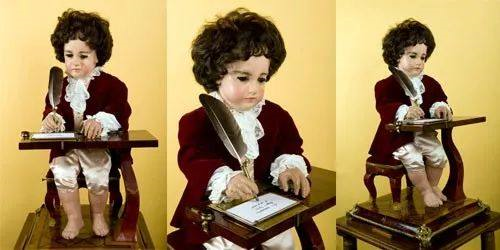
达芬奇设计的“机器武士” 1774年,瑞士的钟表公司雅克德罗发明了会写字的机器人。
雅克德罗推出的The Writer 这个机械人偶,全身布满6000多个精密零部件。
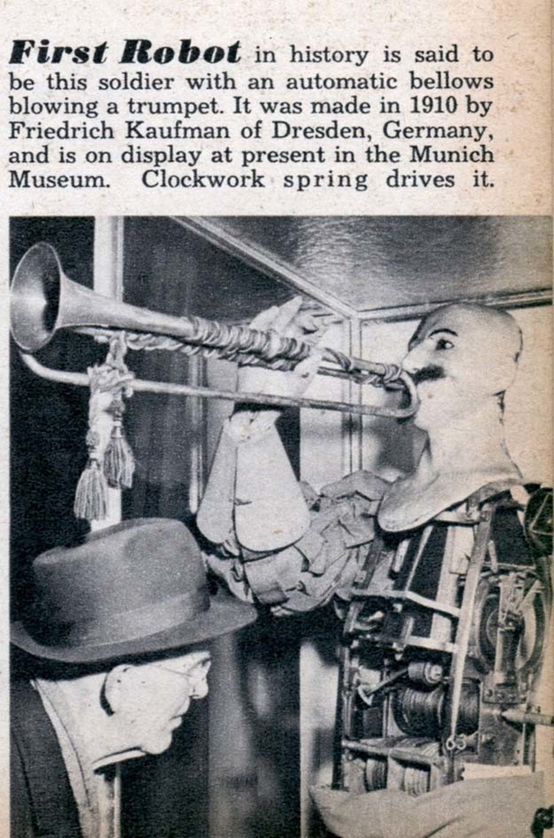
眼睛扑闪扑闪会说话。拿着羽毛笔,蘸真的墨水写字。 厉害的是,写字内容还能“编程”,法语、德语,意大利语……堪称学霸。被称为最早的计算机雏形。 但最令人惊叹的还是,这个1774年制作的机器人,今天依然还可以流畅运作。 世界上第一个机器人据说是这个可以自动吹喇叭的士兵机器人。它在1910年由德国德累斯顿的Friedrich Kaufman制造。现在这个机器人被陈列在慕尼黑博物馆之中。这个机器人由发条装置提供动力。
First Robot 1927年美国西屋公司工程师温兹利制造了第一个电动机器人“ Televox”,装有无线电发报机,可以回答一些问题,但该机器人不能走。 1928年, W. H. Richards发明出第一个人形机器人,内置了马达装置,能够进行远程控制及声频控制。
这些早期的尝试展示了人类对自动化和机器人的早期探索。
现代人形机器人迅猛发展
进入20世纪,随着第三次工业革命,以原子能技术、航天技术、电子计算机技术的应用为代表,还包括人工合成材料、分子生物学和遗传工程等高新技术的突破和发展。人形机器人的行业迎来飞速发展, 可以分为几个关键阶段:
1. 早期发展阶段(1972-1986): - 1972年,早稻田大学在加藤一郎的带领下研发出了WABOT-1,这是世界上第一款全尺寸人形智能机器人。WABOT-1能够执行搬运物体等任务,智力水平相当于一岁半的婴儿。这一阶段的人形机器人主要在实验室环境中进行研究,功能相对有限。
世界上第一款全尺寸人形智能机器人WABOT-1 2. 系统高度集成发展阶段(1986-2010): - 在这个阶段,日本公司如本田和软银开始研发和推出人形机器人,如本田的ASIMO和软银的NAO。这些机器人的应用场景较为简单,主要用于展览和娱乐,展示了人形机器人在运动控制和人机交互方面的进步。
ASIMO演变史
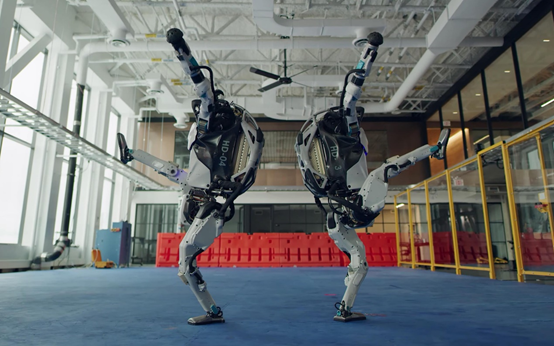
3. 高动态运动发展阶段(2010至今): - 美国公司如波士顿动力和特斯拉开始主导人形机器人的研发,推出了具有更高运动能力和智能化水平的机器人。例如,波士顿动力的Atlas能够完成复杂的动作,如跑酷和后空翻,而特斯拉的Optimus则展示了在家庭和工业场景中的应用潜力。
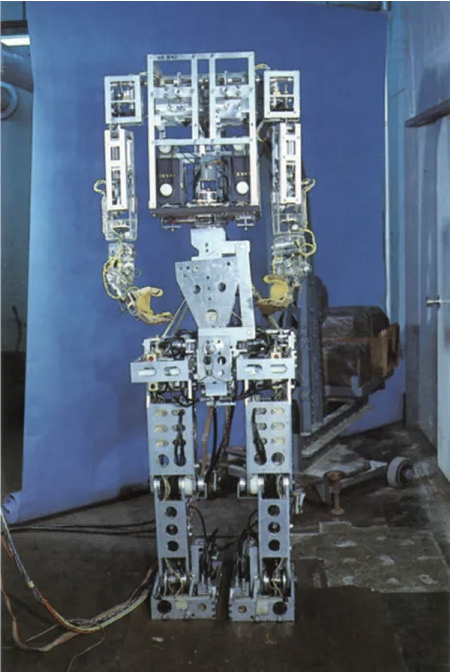
波士顿动力出品的人形机器人“Atlas” 再来看国内的发展,2016年,北京钢铁侠科技推出第一代双足机器人ART-0,2017年完成第二代双足机器人ART-1的研发。
钢铁侠科技研发的第一代双足机器人ART-0
钢铁侠科技研发的第二代双足机器人ART-1
北京钢铁侠科技是国内第一家专门从事双足大仿人机器人研发及推广的科技公司。公司重点研发大型双足仿人机器人及机器人“运动脑”,自主研发机器人核心零部件,拥有多项专利。
人形机器人整个发展历程反映了从简单的结构驱动到高度集成的系统,再到高动态运动和智能化的转变,这一过程伴随着技术的不断突破和市场需求的推动。
商业化及未来展望 随着技术的成熟和成本的降低,人形机器人开始进入商业化和产业化阶段。这一阶段的目标是将人形机器人应用于更广泛的领域,如家庭服务、医疗护理、教育辅助等。同时,随着人工智能和大模型技术的发展,人形机器人的智能化水平不断提升,能够更好地理解和适应复杂环境。 人形机器人的未来预计将更加注重智能化、自主化和人机协作。随着人工智能、机器学习、传感器技术的进步,人形机器人将能够更好地理解和适应复杂环境,执行更加多样化的任务。同时,随着成本的进一步降低,人形机器人有望在更多领域实现广泛应用,成为人类生活和工作的重要伙伴。
文章分类:
大赛
|